STEM-In-Action Fall Follow Up: Hawks
Hello again! It's time to check in on our STEM-In-Action Grant winning teams! Over the next few months we will see posts from each of our winning teams to find out what they are up to this fall. In case you're just now tuning in, the U.S. Army Educational Outreach Program (AEOP) STEM-In-Action Grant awards eCYBERMISSION teams up to $5,000 to develop their projects into mature and scalable solutions in their community. Typically we award this honorary grant to five teams, but this year ten teams took home the prestigious award. The next team we're catching up with is the Hawks!
________________________________________________________________________________
Hello! We are Team Hawks - a group of 10th graders trying to make the lives of those in our community a bit easier, using STEM.
Our project started with a basic question: How do people in our community with blindness cross the road if they can’t see the pedestrian signal? However, though this was a simple question, we found that there was no simple answer as we pursued the topic further. We also discovered and learned about numerous other issues that the BVI (blind/visually-impaired) face in their day-to-day lives, such as with navigation and obstacle detection. Unfortunately, current technology does not help with overcoming these issues. And as a consequence of their blindness or visual impairment, many BVI people also face difficulties obtaining jobs; in fact, the median monthly income for a blind American is just above $3,200, making a smart cane prohibitively expensive for most of the BVI community. All of this culminated in us deciding to put our STEM skills to use making an affordable smart cane for the blind/visually-impaired.
Our solution is an attachment to the white cane that will help the BVI cross intersections, navigate streets, and avoid obstacles. Much of the idea for our solution is based on input we received from a BVI member of our community and an instructor for the blind. And while most smart canes can cost hundreds or even upwards of a thousand dollars, the goal for our solution is to be available for as little as $150 (or less), far less than the canes currently on the market.
There are 3 main systems to our solution: road crossing, obstacle and head-high hazard detection, and navigation.
Our road crossing system consists of a mounted camera capable of being turned on and off by a button. When the cane’s user is at an intersection, they will be able to turn the camera on, activating our AI, which will in turn be able to figure out whether there is a “Don’t Walk” signal or a “Walk” signal. Once a “Walk” signal is detected, the cane will know that it needs to vibrate, and will do that three times in a row to alert the user that they can cross.
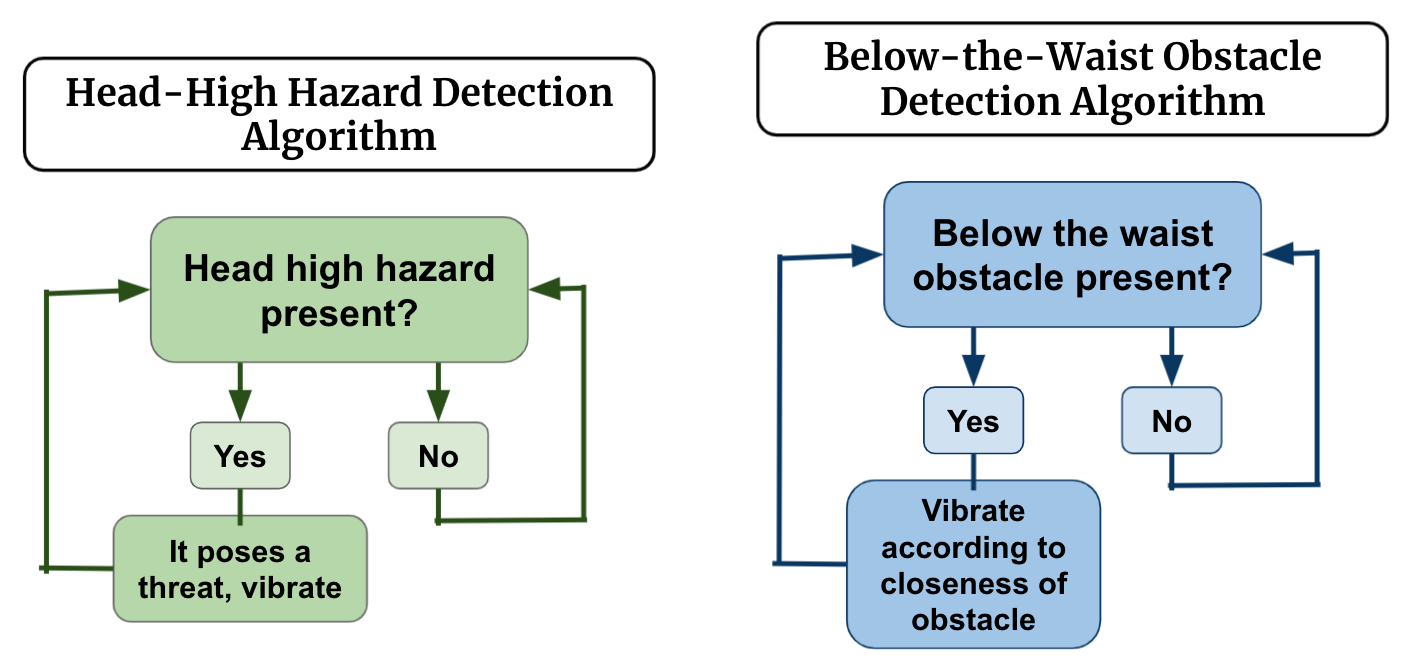
Our obstacle and head-high hazard detection system is pretty simple. Our solution will have two ultrasonic sensors: One for detecting obstacles that are below the user’s waist and one for detecting obstacles that are above the user’s waist (i.e. head-high hazards). If an object is detected, the cane will know to vibrate with an intensity that corresponds to how close the obstacle is (closer = more dangerous = greater intensity).
Coming into this project, we didn’t know a whole lot about artificial intelligence or app building. As a result, we’ve had to meet with experts and take online courses so that we can make our solution. This has formed a decent chunk of what we have done since we were awarded the STEM-In-Action Grant, although we have also achieved significant progress when it comes to our road crossing AI, such as increasing our model’s precision and working on it to run on objects in real-time. Additionally, we have also begun to experiment with indoor navigation.

Our team at work on indoor navigation
A glimpse of the work we’ve been doing on indoor navigation
Being new to many of the topics involved in our solution, we’ve needed to experiment with a lot of things, and the STEM-In-Action Grant is really helping us to learn what we need to, as well as to purchase the materials needed for our project. We plan to use the STEM-In-Action Grant to help us in our learning process and buy materials if we need them to further our project’s development.
Despite still having a lot of work to go, we are confident that we will be able to develop our solution into a full-fledged product. We hope that in the future our solution will help many members of the BVI community and improve their day-to-day lives.


Comments
Post a Comment
We welcome your comments and expect that our conversation will follow the general rules of respectful civil discourse. This is a moderated blog, and we will only post comments from bloggers over 13 years of age that relate to eCYBERMISSION. We will review comments for posting within one business day. Bloggers are fully responsible for everything that they submit in their comments, and all posted comments are in the public domain. We do not discriminate against any views, but we reserve the right not to post comments.